DextAIRity: Deformable Manipulation Can be a Breeze
(a) Cloth unfolding
(b) Bag opening
This paper introduces DextAIRity, an approach to manipulate deformable objects using active airflow. In contrast to conventional contact-based quasi-static manipulations, DextAIRity allows the system to apply dense forces on out-of-contact surfaces, expands the system's reach range, and provides safe high-speed interactions. These properties are particularly advantageous when manipulating under-actuated deformable objects with large surface areas or volumes. We demonstrate the effectiveness of DextAIRity through two challenging deformable object manipulation tasks: cloth unfolding and bag opening. We present a self-supervised learning framework that learns to effectively perform a target task through a sequence of grasping or air-based blowing actions. By using a closed-loop formulation for blowing, the system continuously adjusts its blowing direction based on visual feedback in a way that is robust to the highly stochastic dynamics. We deploy our algorithm on a real-world three-arm system and present evidence suggesting that DextAIRity can improve system efficiency for challenging deformable manipulation tasks, such as cloth unfolding, and enable new applications that are impractical to solve with quasi-static contact-based manipulations (e.g., bag opening).
Paper
Latest version: arXiv
Robotics: Science and Systems (RSS) 2022
★ Best Systems Paper Award Finalist, RSS ★

Team





1 Columbia University 2 Toyota Research Institute
BibTeX
@inproceedings{xu2022dextairity,
title={DextAIRity: Deformable Manipulation Can be a Breeze},
author={Xu, Zhenjia and Chi, Cheng and Burchfiel, Benjamin and Cousineau, Eric and Feng, Siyuan and Song, Shuran},
booktitle={Proceedings of Robotics: Science and Systems (RSS)},
year={2022}
}Technical Summary Video (with audio)
System and Task Setup
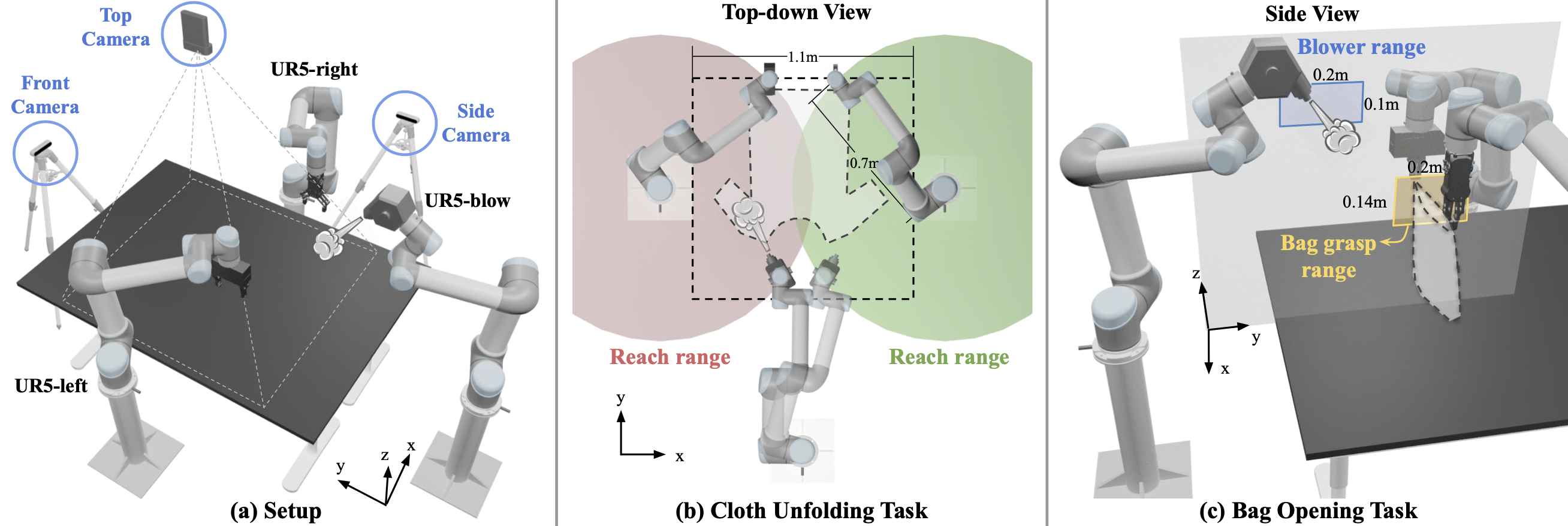
Our system setup consists of (a) three UR5 robot arms, two of which are equipped with parallel-jaw grippers and one with a commodity centrifugal air pump. (b) shows a top-down view of the workspace and robots' reach range for the cloth unfolding task. (c) shows a side view of the workspace and the robots' action space for the bag opening task.
Cloth Unfolding Results
(1) Dress
Quasi-static primitives (e.g., picka and place) are very slow and often require many interactions to achieve the goal. Dynamic actions (e.g., fling) are restricted by a robot's reach range and the speed at which it can safely move. Instead, we adopt an air-based strategy (DextAIRity) and equipped our robot with a controllable commodity air pump. After learning a closed-loop control policy for the pump, the robot is able to easily unfold the heavy dress.
(2) Shirt
In this case, because the shirt being unfolded is relatively small, both FlingBot and our approach, DextAIRity, perform well.
(3) Large Rectangle Cloth
However, as clothing items become larger, contact-based flinging begins to suffer. FlingBot is only able to half-unfold this large cloth, while our approach maintains good performance.
(4) X-Large Rectangle Cloth
Bag Opening Results
This simple task is surprisingly difficult to accomplish with contact-based manipulation, even when using dynamic actions such as shaking the bag back and forth. We also explore implementing a heuristic fixed-pose blowing policy and, while it performs slightly better, it also fails to reliably open the target bag. our learning-based approach can quickly and reliably open the majority of bags we tested.
(1) Small Bag
DextAIRity
2x
DextAIRity-fixed
2x
Shake
2x
(2) Medium Bag
DextAIRity
2x
DextAIRity-fixed
2x
Shake
2x
(3) Large Bag
DextAIRity
2x
DextAIRity-fixed
2x
Shake
2x
(4) Downstream task: Putting objects inside a bag
With Blow
The bag is maximally opened and objects can be easily put inside. Tossing is even acceptable!
Without Blow
Default bag opening is so small that complex pick-and-place policy is required and success rate is poor.
(5) Failure analysis
Put from front (Failure)
Large object may block airflow.
Put from behind (Success)
Airflow won’t be affected any more.
Acknowledgements
We would like to thank Huy Ha, Dale McConachie, Naveen Kuppuswamy for their helpful feedback and fruitful discussions. This work was supported by part by the Toyota Research Institute and NSF CMMI-2037101 and NSF IIS-2132519. We would like to thank Google for the UR5 robot hardware. The views and conclusions contained herein are those of the authors and should not be interpreted as necessarily representing the official policies, either expressed or implied, of the sponsors.
Contact
If you have any questions, please feel free to contact Zhenjia Xu.